 400 025 3599
400 025 3599 




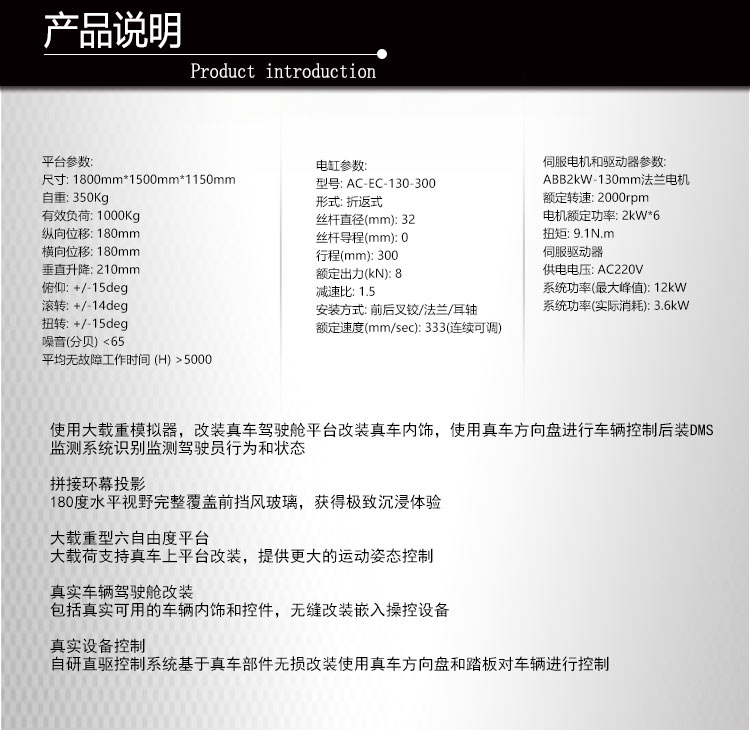
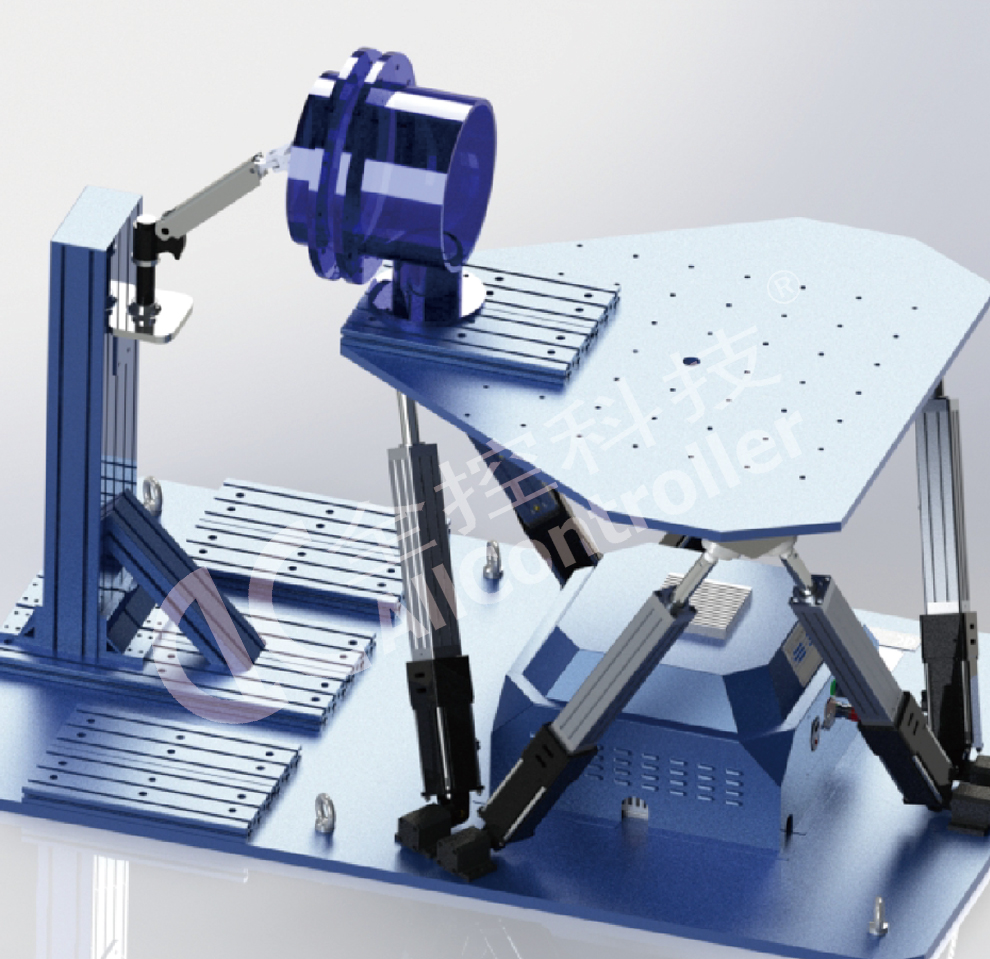
該款六自由度卡車駕駛模擬器設備由模擬駕駛艙、視景模擬駕駛軟件、數(shù)據(jù)采集系統(tǒng)、六自由度運動平臺、微型控制器、伺服驅動系統(tǒng)等組成(如下圖)。六自由度平臺系統(tǒng)由Stewart機構的六自由度運動平臺、計算機控制系統(tǒng)、驅動系統(tǒng)等組成。下平臺安裝在地面的固定基座基上,上平臺為支撐平臺。計算機控制系統(tǒng)通過協(xié)調控制電動缸的行程,實現(xiàn)運動平臺的六個自由度的運動,即笛卡爾坐標系內的三個平移運動和繞三個坐標軸的轉動。
以六自由度并聯(lián)機構作為駕駛艙操縱仿真系統(tǒng),能夠實現(xiàn)駕駛艙對仿真圖形的快速、穩(wěn)定的反映,通過模擬駕駛艙和計算機實時生成汽車行駛過程中的虛擬視境、音響效果和運動仿真等駕駛環(huán)境, 以視景仿真管理軟件實現(xiàn)虛擬環(huán)境的“沉浸感、交互性”特性,為駕駛人提供了在坡路、顛簸路面等以及車輛加減速、轉向、側滑時的運動臨場感,同時能夠針對轎車、貨車、客車等各類車型進行包括臨界、極限工況的全工況仿真實驗,分析、預估和評價汽車的操縱穩(wěn)定性、安全性、制動性、動力性和燃油經(jīng)濟性,對汽車運動性能控制系統(tǒng)進行仿真、評價、預測和優(yōu)化,提供車型結構參數(shù)匹配的最優(yōu)化方案等,對于汽車駕駛模擬器開發(fā)具有重要而現(xiàn)實的意義。





關鍵詞: 卡車模擬器,卡車模擬平臺






 在線咨詢
在線咨詢 




